











ПРАКТИЧЕСКАЯ АСТРОНОМИЯ: МЕТОД СЕНТ-ИЛЕРА.
-
Недостатки метода Сомнера
-
При всех своих достоинствах, метод Сомнера обладает и недостатками. Самый главный из них — необходимость достаточно тщательно подбирать светила для расчетов: нельзя использовать светила, расположенные в данный момент вблизи от местного меридиана (т.е. строго на севере/юге, или, что то же самое, вблизи верхней/нижней кульминации). Нетрудно понять, почему так происходит: ведь в этом случае линия положения окажется между двумя параллелями, и мы никак не сможем построить секущую к кругу равных высот:

-
Метод астрономического определения, не зависящий от выбора направления на светило —метод переносов — был предложен французским мореплавателем Сент-Илером в 1875 году и очень скоро стал основным в практической астрономии. Несмотря на то, что теоретическое обоснование метода переносов достаточно сложное и требует знания дифференциального исчисления, на практике он оказывается удобным и точным. Тем не менее, в отличие от метода Сомнера, данный метод требует для построения линий положения наличия мерного циркуля и угломерного инструмента типа транспортира или протрактора.
-
Формула высоты
-
Из формулы косинусов следует, что высота светила является функцией от трех аргументов: широты наблюдения, склонения светила и местного часового угла:

-
Эта формула часто называется формулой высоты и всегда присутствует на справочной странице «Навигационного альманаха».
-
Метод переносов
-
Прежде всего выберем на карте произвольную вспомогательную точку AP, расположенную недалеко от нашего приблизительного местоположения — лучше всего, если это будет точка, в которой пересекаются две линии координатной сетки. Широта и долгота этой точки будут равны соответственно LatAP и LonAP. Выберем некоторое светило и определим его географическое положение GP на данный момент. Тогда часовой угол t будет равен разности долгот LatAP и LatGP:
-
t = LatAP – LatGP.
-
Подставим полученное значение t, широту LatAP и склонение светила Dec в формулу высоты и получим некоторое значение высоты светила hAP. Обратите внимание: мы просто решили для точки AP первую часть обратной задачи практической астрономии, то есть определили по известным географическим координатам высоту светила.
-
Измерим видимую высоту выбранного светила hвид. Если бы мы находились точно в точке AP,тогда полученное нами значение совпало с вычисленным на предыдущем шаге:
-
hвид = hAP.
-
Однако что делать, если мы находимся на некотором расстоянии от точки AP?
-
Назовем переносом dh разность между видимой высотой светила hвид и вычисленной высотойhAP:
-
dh = hвид — hAP.
-
Формула высоты, как мы уже говорили, представляет собой функцию от трех переменных:
-
h = f(Lat, Dec, t).
-
Для выбранного светила склонение является константой, поэтому у нас остаются только две переменные:
-
h = f(Lat, t).
-
Воспользуемся дифференциальным исчислением и предположим, что dh – бесконечно малая величина, линейно зависимая от бесконечно малых приращений аргументов функции dLat и dt:

-
-
Предположим, что мы находимся на том же меридиане, что и точка AP, и перенос dhобразовался только из-за смещения по широте, то есть dt = 0. Продифференцируем формулу высоты по переменной Lat:

![]()
-
-
Прибавив величину dLat к широте вспомогательной точки LatAP, мы получим некую точку P1 (см. рисунок далее по тексту). Точка P1 находится на том же круге равных высот, что и наблюдатель.
-
Теперь предположим, что мы находимся на той же параллели, что и точка AP, и перенос dhобразуется только за счет смещения по долготе (dLat = 0). Продифференцируем формулу высоты по переменной t:

![]()
Прибавив полученное значение dt к долготе вспомогательной точки LonAP, мы получим точку P2,которая также находится на круге равных высот наблюдателя (то есть если бы мы наблюдали выбранное светило из точек P1 и P, мы получили бы то же самое значение высоты hвид).
 |
|
|---|---|
 |
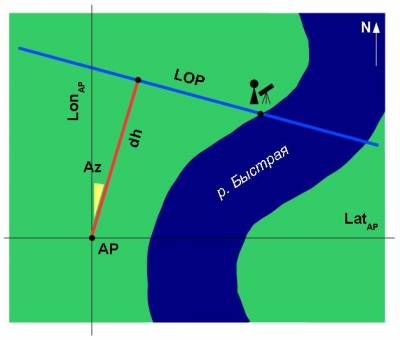
Определив точки P1 и P2, мы можем провести через них линию, которая будет представлять собой касательную к кругу равных высот — это и будет наша линия положения LOP. Назовемазимутальной линией большой круг, проходящий через точки AP и GP. Очевидно, что эта линия будет перпендикулярна линии положения, при этом длина дуги между точками AP и GP будет равняться радиусу круга равных высот, построенного для точки AP. Расстояние от точки AP до точки, где азимутальная линия пересекает линию положений, в точности равняется переносу dh.Угол между азимутальной линией и меридианом точки AP мы назовем азимутальным углом Az.
-
Вычисление азимутального угла
-
Точки AP, P1 и P2 образуют прямоугольный треугольник, что позволяет вывести сразу несколько формул для определения азимутального угла Az.
-
Первая формула:
-

Вторая формула (именно она обычно публикуется в «Навигационном Альманахе»):
![]()
-
Как видите, данная формула вообще не использует в качестве аргумента высоту светила.
-
Третья формула напрямую следует из навигационного треугольника, мы уже находили по похожей формуле азимут, когда решали обратную задачу (см. «Обратная задача »). Данная формула не использует в качестве аргумента часовой угол.
![]()
-
Процедура определения
-
Хотя в теории метод переноса и выглядит немного пугающе (по крайней мере, в сравнении с методом Сомнера) , на практике он достаточно прост, и совершенно не требует никаких знаний из области дифференциального исчисления. Для определения местоположения следует произвести следующие действия:
-
1) Выбираем вспомогательную точку AP — например, ближайшую точку с координатами, содержащими целое число градусов (если это позволяет масштаб карты). При желании вместо точки AP мы можем задать приблизительные координаты места наблюдения. Тем не менее, нанесение линий на карту будет наиболее удобным в случае, если точка AP находится на пересечении линий координатной сетки.
-
2) Вычисляем географическое положение светила GP и определяем часовой угол tнавигационного треугольника (абсолютное значение разности между долготой географического положения и долготой вспомогательной точки AP).
-
3) Вычисляем высоту выбранного светила на основе известных LatAP, t и Dec:
4) Используя одну из рассмотренных выше формул нахождения угла азимута найдем азимут светила AZ на основе известных величин hAP, LatAP, t и Dec, например:
![]()
5) Вычтем из видимой высоты светила hвид вычисленную высоту hAP и найдем тем самым значение переноса dh. Величина переноса пропорциональна разности между радиусами соответствующих кругов равных высот:
![]()
-
6) На карте отложим от направления на север полученный азимутальный угол и проведем через точку AP линию азимутов на достаточную длину. Вдоль этой линии отложим от точки AP отрезок, длина которого в точности равна полученному значению dh (по направлению к точке GP, если dh > 0, и в противоположном направлении, если dh < 0). Затем через найденную таким образом точку проведем перпендикуляр к азимутальной линии, именно он и будет нашей линией положения.
-
7) Для определения местонахождения нам потребуется как минимум еще одна линия положения. Наблюдаем второе светило (или то же самое светило спустя определенный промежуток времени) и повторяем все расчеты и построения. Точка пересечения двух линий положения (касательных к позиционным кругам) и будет искомой точкой. Следует отметить, что для второго измерения высоты вовсе необязательно брать одну и ту же вспомогательную точку AP.
-
 Как и метод Сомнера, метод переносов является приближенным и, в частности, игнорирует кривизну истинных линий положения. Ошибка будет допустимой в случае, если а) радиусы кругов равных высот достаточно большие (т. е. ни одно из светил не находится вблизи зенита) и б) вспомогательная точка AP была взята не слишком далеко от истинной точки местонахождения наблюдателя. Аналогично методу Сомнера, погрешность метода переносов можно существенно уменьшить, используя итерации, т.е. последовательные исправления положения точки AP с повтором всех расчетов для тех же значений высот и географических положений. Итерации продолжают до тех пор, пока разность между координатами двух последовательно вычисленных точек местоположения не станет пренебрежимо малой.
Как и метод Сомнера, метод переносов является приближенным и, в частности, игнорирует кривизну истинных линий положения. Ошибка будет допустимой в случае, если а) радиусы кругов равных высот достаточно большие (т. е. ни одно из светил не находится вблизи зенита) и б) вспомогательная точка AP была взята не слишком далеко от истинной точки местонахождения наблюдателя. Аналогично методу Сомнера, погрешность метода переносов можно существенно уменьшить, используя итерации, т.е. последовательные исправления положения точки AP с повтором всех расчетов для тех же значений высот и географических положений. Итерации продолжают до тех пор, пока разность между координатами двух последовательно вычисленных точек местоположения не станет пренебрежимо малой. -
Сочетание различных линий положения
-
 Поскольку точка местонахождения наблюдателя определяется пересечением как минимум двух линий положения (неважно — каких!), в случае, если нам известна хотя бы однанеастрономическая линия положения, для определения географических координат достаточно произвести измерение высоты только одного светила.
Поскольку точка местонахождения наблюдателя определяется пересечением как минимум двух линий положения (неважно — каких!), в случае, если нам известна хотя бы однанеастрономическая линия положения, для определения географических координат достаточно произвести измерение высоты только одного светила. -
Например, если мы находимся на берегу реки, мы можем определить наше местонахождение, отыскав на карте точку, где линия положения, полученная астрономическим способом (по методу Сомнера или методом переносов), пересекает береговую линию:
-
Другой пример — для определения местонахождения можно отыскать точку пересечения астрономической линии положения с линией азимута на расположенный вдали приметный объект: отдельно стоящее дерево, гору, маяк, фабричную трубу и т.д.

-
Практический пример
-
Исходные данные: 28 июля 2013 года, 0 часов 30 минут московского времени (MSK). Измерены высоты для двух звезд: Альтаир (? Орла) h = +47?23'54", Арктур (? Волопаса) h = +17?52'02".Приблизительные координаты местонахождения: 51? N, 46? E. Задача: определить географические координаты места наблюдения методом переносов.
-
1) Определяем время по Гринвичу (UT): 27/07 2013, 20:30. Открываем «Навигационный Альманах» на странице 27 июля и выписываем гринвичский часовой угол точки весеннего равноденствия на 20 часов: GHA? = 245?39'6", оставшиеся 30 минут интерполируем: 245?39'6" + 15?0.041666'/2 = 253?9'7.4".
-
2) Выписываем из колонки «Stars» координаты звезд: SHA = 62?7.8' Dec = 8?54.5'(Altair); SHA = 145?55.6' Dec = 19?6.9' (Arcturus). Вычисляем географические положения:
-
Altair: 8?54.5' N 44?43' 4.6" E
-
Arcturus: 19?6.9' N 39?4'43.4" W
-
 3) Находим часовые углы: tAlt = 1?16'55.4" (NB: часовой угол близок к нулю, метод Сомнера здесь не подойдет!), tArc = 85?4'43.4".
3) Находим часовые углы: tAlt = 1?16'55.4" (NB: часовой угол близок к нулю, метод Сомнера здесь не подойдет!), tArc = 85?4'43.4". -
4) Считаем высоты и переносы: hAlt = 47?53'42.12", dhAlt = -0?29'48.12", hArc = 17?47'17.5" dhArc = 0?4'44.5". Первый перенос равен 55 км 230 м (в обратном направлении, поскольку значение dh отрицательное!), второй перенос равен 10 км 640 м.
-
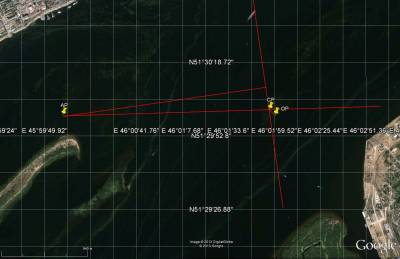
5) Считаем азимуты: AzAlt = 178?6'15.97", AzArc = 81?21'26.85". Можно приступать к построению линий на карте:
-
- В данном случае мы с первого же построения "попали в яблочко" с погрешностью порядка 1 километра — вспомните, что при работе с методом Сомнера нам понадобилось 3 итерации для того, чтобы добиться подобной точности! И это, само собой, не предел — мы можем легко улучшить результат методом последовательных приближений: просто подставим полученные координаты для вспомогательной точки AP и повторим наши вычисления. Берем для второй итерации в качестве вспомогательной точку с координатами 51?30' N 46?00' E — на иллюстрации хорошо видно, что вычисленная нами на второй итерации точка местоположения CP находится от эталонной точки OP на расстоянии менее 100 метров (почти GPS, только с карандашом, блокнотом и калькулятором!):
-
Статья опубликована: http://astrodummies.com/index/prakticheskaja_astronomija_iv/0-13